Vous êtes curieux des solutions actuelles de robotisation en BVP ? Vous vous demandez quelles étapes de fabrication ont le plus intérêt à être automatisées et avec quelles technologies ? Vous avez des projets d’investissements et vous vous interrogez sur la pertinence de vos choix ? Vous souhaitez en savoir d’avantage sur ces thématiques d’automatisation des tâches ? Dans tous les cas, c’est avec une volonté de partage de notre expertise technique que nous avons réalisé cet article dédié aux solutions de robotisation en BVP pour la fabrication de pains, viennoiserie, pâtisserie et autres produits de snacking sucrés ou salés.
Hopi consulting est le seul bureau d’études entièrement spécialisé dans le secteur de la BVP et du snacking. Ce choix d’intervenir dans ce seul secteur d’activité nous permet d’offrir une expertise métier concrète et une garantie de solutions sur mesure. Notre approche globale touche les équipements, les utilités et les infrastructures : elle offre à nos clients un partage de savoir-faire et d’expérience qui font notre force et notre particularité. Nous parlons le même langage et nous appréhendons les enjeux de nos clients comme des réflexes.

L’introduction de la robotique dans les process de fabrication en BVP touche toutes les étapes, depuis la fabrication jusqu’au packaging, les enjeux sont nombreux. Conditions de travail, OPEX et productivité, CAPEX et niveau d’investissements, qualité produit, hygiène et flexibilité de production sont à bien prendre en considération pour faire les bons choix. Investir dans des solutions de robotisation n’est pas anodin et la réussite sera signe de leviers d’amélioration et de profits mais à l’inverse l’échec entrainera sans aucun doute contraintes et pertes.
L’introduction de la robotique est un sujet récurrent de nos clients, cet article a donc pour but de présenter les scénarii d’investissements gagnants mais aussi les chemins à éviter.
Merci à Tony REDOLFI et Guillaume DESJARDINS de l’entreprise DEMAUREX pour leur collaboration à cet article.
Quels robots pour quelles applications en BVP ?
Produits nus
La robotisation de la manipulation de produits nus en BVP (pâtons crus, produits façonnées, poussés, cuits, refroidis encore non emballés…) entraine des contraintes spécifiques liées au contact direct avec le produit. Ces produits sont par nature délicats, parfois collants, nappés, décorés en surface avec du toppings et présentent souvent une variabilité importante en termes de forme, de poids ou de texture.
Ces opérations nécessitent une attention particulière afin de préserver l’intégrité du produit, son aspect visuel et, dans certains cas, sa structure interne. La robotisation est donc à introduire en bonne connaissance de cause, lorsque l’enjeu de productivité est clairement notable au travers de gains de cadences, de réduction de pertes matières, d’enjeux qualité ou d’amélioration des conditions de travail en raison des gestes répétitifs.

Type de préhenseurs :
Le choix du préhenseur est ici un point clé du succès du projet. Plusieurs technologies existent aujourd’hui :
- Préhenseurs par aspiration type ventouses :
Largement répandus pour les produits relativement stables et peu collants, ils offrent une solution simple qui consistent à poser sur la surface supérieure du produit plusieurs ventouses aspirantes. Le produit ainsi tenu peut être manipulé et transporté. C’est la solution idéale et robuste pour le démoulage de nombreux produits de BVP à la surface lisse comme les produits moulés tels les pains de mie ou les brioches. A l’inverse cette solution n’est pas envisageable si le produit est décoré en surface : nappage, topping, dorage mais aussi grainage comme pour de nombreux buns. Dans ce cas une autre technologie s’impose.

- Préhenseurs mécaniques à griffes ou à aiguilles :
Solution traditionnelle et ayant fait ses preuves, cette option utilise des fines aiguilles ou griffes qui pénètrent dans le produit pour ensuite le déplacer sans risque de chute. Parfaitement adaptés aux petits produits de pâte jaune comme les madeleines mais aussi les briochettes ou les pains au lait, ce choix permet aussi de manipuler des produits décorés en surface comme des cakes ou des muffins. Cette solution est parfaitement adaptées aux produits grainés comme les buns décorés avec du sésame. Cette technologie limite les marques et les déformations visibles sur le produit.
- Solution mixte aspiration / aiguilles :
Il est possible pour offrir encore d’avantage de garanties de mixer ces deux technologies : le produit est alors tenu à la fois par des ventouses en surface mais aussi des griffes latérales. Cette option peut s’avérer gagnante si l’analyse du risque de l’une ou de l’autre solution déployée toute seule est trop élevé : surface du produit trop aléatoire, vitesse de manipulation trop élevée…
- Préhenseurs mécanique souples (doigts flexibles, pinces adaptatives) :
C’est la solution qui se compare le mieux aux gestes d’une personne humaine. Elle est parfaitement adaptés aux produits délicats et décorés car elle limite les marques et les déformations. Mais cette solution est plus engageante, elle est plus complexe techniquement et son coût est plus élevé : c’est une bonne garantie dans le cas de projets à fortes cadences.

Type de robots envisagés :
Les applications sur produits nus s’orientent majoritairement vers 2 types de solutions, prévues pour évoluer dans des milieux à haut niveau d’hygiène (Univers humide ou farineux) :
- Robot Delta :
Cette solution offre des cadences élevées et des mouvements rapides sur des produits unitaires et légers.
- Robot 6 axes :
Privilégiés lorsque la flexibilité, la gestion de multiples formats ou l’intégration dans des environnements complexes est nécessaire. Cette solution est également appropriée dans le cas de manipulation de charges plus lourdes comme de gros produits de BVP mais surtout des contenants : bacs, grilles…

La robotisation des produits nus est principalement pertinente en tête de ligne car elle permet de remplacer des opérations manuelles simples et répétitives. Mais elle ouvre aussi des possibilités d’innovations grâce à des manipulations aussi complexes que rapides inenvisageables grâce à des opérateurs humains.
La robotisation joue tout son rôle en amont du packaging, lorsque les produits sont stabilisés et refroidis. Il peut s’agir de ranger et d’ordonner un flux dispersé de produits pour ensuite les introduire dans les machines de conditionnement primaire comme les emballeuses flowpack ou les thermoformesues.

Avantages :
- Productivité et cadences plus élevée
- Meilleure répétabilité
- Amélioration de l’hygiène par la limitation des contacts humains
- Réduction de la pénibilité et des troubles musculo-squelettiques (TMS)
- Maîtrise du risque lié à la raréfaction de collaborateurs disponibles pour accomplir ce type de tâches
Inconvénients :
- Investissement plus important que pour la manutention d’éléments inertes
- Emprise au sol plus importante
- Risque d’absence de flexibilité dans le cas de nombreux formats
- Maintenance, prise en mains et mise en service plus complexes
- Risque de manque d’évolutivité pour les innovations futures
Quelques exemples d’applications :
- Dépose sur plaques ou filets de cuisson de pâtons ou de viennoiseries façonnées
- Scarification de pain sur filets ou peel boards
- Pick & place de produits pour chargement d’une chaine à taquets Flowpack
- Transfert de produits entre lignes ou vers des équipements de conditionnement
Manutention des bacs, plaques et moules
De nombreuses étapes de production en BVP utilisent des unités de manutention telles que des attelages de moules et des filets pour la cuisson, des bacs pour le repos ou des plaques et des grilles pour le ressuage. Ces éléments sont souvent utilisés en grands nombres et il est courant d’avoir des jeux de plusieurs centaines voire milliers d’unités, ce qui peut donc nécessiter de nombreuses manipulations. De plus, afin de gagner en cadence, ces unités de manutentions atteignent régulièrement des dimensions importantes et donc des poids importants.
Les étapes de manipulations et de transfert des éléments de manutention présentent souvent toutes les caractéristiques d’opérations pour lesquelles la robotisation s’impose comme une solution gagnante :
- Des opérations répétitives et à cadences élevées ou un opérateur n’apporte pas de valeur ajoutée
- Des opérations trop pénibles pour un opérateur avec des charges lourdes et encombrantes
- Des opérations simples avec peu de variabilité d’un format à l’autre
Type de préhenseurs :
La robotisation de ces étapes est facilitée par l’absence de contact direct avec les produits et les préhenseurs sont relativement simples pour pouvoir saisir des éléments bien souvent standards.
Type de robots envisagés :
Plusieurs types de robots sont envisageables pour ces réalisations allant du simple cartésien au bras à 6 axes. Ces choix vont avoir un impact sur le coût, la maintenance et la capacité à accepter des nouveaux formats.
Avantages :
- Cadences élevées et répétabilité constante
- Réduction de la pénibilité et des risques pour les opérateurs
- Fiabilisation des flux et meilleure hygiène
- Libération des opérateurs pour des tâches à plus forte valeur ajoutée
Inconvénients :
- Investissement initial à anticiper
- Rigidité possible selon le type de robot choisi
- Nécessité d’un environnement et de flux maîtrisés
- Compétences requises pour exploitation et maintenance
La fiabilité dans le temps des installations de manutention de contenants dépend directement de l’usure de ces derniers. En effet, il existe un lien direct entre la perte de productivité de ces installations et les défauts des contenants liés à l’usage tels que des chocs ou de la casse. Il est simple de comprendre que les points de références et les mouvements définis au robot à la mise en service avec des plaques planes et des chariots neufs peuvent être pénalisés si ces mêmes plaques sont voilées ou ces mêmes chariots abimés. Il est donc très important de définir une certaine tolérance de la part de la solution robotisée et de surveiller le taux d’usure des contenants et des chariots.
Quelques exemples d’applications :
- Le chargement/déchargement des plaques ou grilles sur des chariots de cuisson ou des échelles pâtissières
- La palettisation de bacs de produits semi-finis
- Le changement de format de filets ou d’attelages de moules sur une ligne

Manutention des cartons, sachets ou palettes
La robotisation de ces éléments concerne les opérations de packaging, palettisation, dépalettisation et stockage automatisé. Les cartons, sachets ou palettes étant standardisés et souvent rigides, leur manipulation est donc plus simple pour un robot.
Il existe toutefois quelques enjeux :
dans le cas de manutention de sachets plus difficile à capter comme les sachets de regroupements de petits produits comme des briochettes : ces sachets sont flottants et les produits bougent à l’intérieur.
dans le cas de manipulation de produits surgelés. La condensation et l’humidité sur les emballages est une cause de perte de productivité des solutions robotisée.
Type de préhenseurs :
- Pinces mécaniques ou griffes :
Solution économique, adaptée aux tâches répétitives sur palettes ou convoyeurs.
- Ventouses :
Solution utile pour les sachets ou les emballages légers.
Type de robots envisagés :
- Robot Cartésien :
Solution économiques, adaptés aux tâches répétitives sur palettes ou convoyeurs.
- Robot 6 axes :
Flexible pour différents formats, orientations ou emplacements dans les zones de stockage.
Les applications pour lesquelles la robotisation n’a pas de valeur ajoutée
Certaines opérations en BVP présentent peu d’intérêt à être robotisées, soit en raison de leur simplicité, soit à cause d’une variabilité trop importante, soit parce que des solutions mécaniques plus simples existent déjà.

Quelques exemples d’applications peu pertinentes :
- Opérations déjà optimisées par des solutions mécaniques simples, comme les tapis rétractable ou les solutions gravitaires.
- Manipulation de produits très fragiles ou très variables, pour lesquels l’intervention humaine reste plus adaptée et plus qualitative.
- Opérations simples et à faibles cadences ne justifiant pas l’investissement et la complexité d’un robot.
- Tâches nécessitant une appréciation visuelle ou un ajustement fin en temps réel, difficilement reproductible par un système robotisé standard.
- Postes à forte variabilité de formats sans standardisation, entraînant des temps de réglage incompatibles avec les gains attendus.
- Opérations saisonnières rendant le retour sur investissement difficile : c’est le cas des déposes des fèves des galettes des rois.
Notre avis technique
La robotisation en BVP doit être envisagée comme un outil au service de la performance globale, et non comme une fin en soi. Sa pertinence repose sur un équilibre entre coût, productivité, conditions de travail et qualité produit.
Investissement CAPEX
Le coût d’investissement ne doit pas être évalué uniquement par le prix du robot. L’analyse doit intégrer l’ensemble de l’écosystème : préhenseur, interfaces machines, formation des opérateurs, sécurité, intégration et maintenance. Un CAPEX plus élevé peut être pertinent s’il garantit la flexibilité pour différents formats, la montée en cadence et l’adaptabilité aux évolutions futures de la ligne.
Intégration dans l’espace de travail
L’intégration d’un robot doit être pensée dès la conception de la ligne, ou soigneusement adaptée lorsqu’il s’agit d’une installation existante. L’encombrement, les flux opérateurs, l’accessibilité pour la maintenance et le nettoyage sont des points clés. Une solution techniquement performante mais mal intégrée peut rapidement devenir une contrainte opérationnelle, ralentir la production ou compliquer l’exploitation.
La prise en compte de l’évolutivité de l’installation pour s’adapter aux produits futures et / ou à de plus fortes cadences est une priorité en phase d’avant projet. Une augmentation de cadences impose souvent l’ajout d’un robot additionnel, si l’espace suffisant n’est pas anticipé cette option est rendue impossible. À l’inverse, investir dans une installation sur capacitaire ou laisser un espace libre futur sont des conseils que nous préconisons fortement.
Cadences et formats
Le nombre et la variabilité des formats sont des points de vigilance majeurs pour l’intégration d’un robot. Plus les formats sont nombreux, plus les risques augmentent: ralentissement de la cadence à cause des temps de changement, complexité accrue entraînant des pannes ou des coûts supplémentaires. Idéalement, un robot fonctionne sur un format stable ou avec un nombre limité de formats pour garantir performance et fiabilité. Lorsque la variabilité est trop importante, les opérations manuelles peuvent rester la solution la plus fiable et efficace.
Produits, qualité et régularité
Le poids, la fragilité et la variabilité des produits influencent fortement le choix du robot et du préhenseur, mais aussi les mouvements et trajectoires à réaliser. La robotisation doit garantir une qualité constante, sans dégradation de l’aspect visuel ou de la structure des produits, tout en assurant une régularité compatible avec les exigences aval (cuisson, conditionnement).
Pénibilité, ergonomie et sécurité
La robotisation réduit la pénibilité des postes répétitifs ou manipulant des charges lourdes, tout en améliorant l’ergonomie pour les opérateurs. La sécurité reste la priorité : les zones de travail doivent être protégées par des barrières, sauf lorsqu’on utilise des cobots.
Ces derniers offrent une alternative sûre pour les tâches collaboratives : grâce à leurs capteurs et à la limitation de force, ils peuvent travailler directement aux côtés des opérateurs sans compromettre la sécurité, tout en offrant flexibilité et intégration facile dans des lignes existantes.
Hygiène et nettoyabilité
En BVP, les exigences sanitaires sont strictes. Les robots et préhenseurs doivent être faciles à nettoyer et accessibles, avec des matériaux adaptés aux contraintes alimentaires et à l’humidité.
La conception des installations doit limiter les zones de rétention et faciliter l’accès pour le nettoyage quotidien. Une bonne hygiène mécanique contribue directement à la qualité et la régularité des produits, tout en garantissant la conformité aux normes sanitaires.
Maturité technique et industrielle
L’intégration de la robotique si elle n’est pas préparée peut-être la raison d’un frein à la performance industrielle. En effet, ces installations si elles sont nouvelles sur un site imposent un changement d’habitudes en termes de maintenabilité de l’installation mais aussi d’approches d’analyses des défauts techniques. L’impact de la chaine de production en amont par exemple est souvent l’origine d’un défaut visible en bout de chaine robotisée. Les regards doivent alors se tourner non pas sur l’étape où a lieu l’incident technique mais bien avant, ce qui reste un exercice complexe. En parallèle, le service maintenance doit quant à lui se former et monter en compétences avec des thématiques d’automatismes. L’intégration d’un poste robotisé doit donc s’inscrire indiscutablement dans un processus mêlant ressources humaines avec comme cible l’accompagnement au changement et l’acquisition de nouvelles compétences techniques.
Ne jamais investir sans avoir préalablement définis dans le détail votre besoin actuel et futur. Le cahier des charges est l’outil indispensable pour cette étape d’avant-projet et de consultations des fournisseurs : C’est la garantie pour mettre sous contrôle l’ensemble des dangers et faire rimer votre investissement avec succès.
L’option gagnante en termes d’investissements est de greffer un poste manuel en fin d’installation robotisée. Cette solution permet d’éviter les changements de formats pénalisants tout en acceptant de travailler des gammes de produits complexes et/ou marginaux.
Présentation de la société DEMAUREX
DEMAUREX est une entreprise Suisse spécialisée dans les technologies robotiques appliquées au conditionnement industriel, notamment dans le secteur de l’emballage et de la manutention automatisée. Elle est reconnue comme un pionnier de la robotique Delta, un type de robot rapide et précis utilisé pour les systèmes de prise et dépose de produits (Pick & Place) dans les lignes de production.
Quelques chiffres :
- Date de création : 1983
- Effectif : 65 Personnes
- Localisation : Vufflens-la-Ville (Suisse)
- Chiffre d’affaires : 24 M€ (2024)
- Superficie de l’usine : 6500 m²
- Robots « Pick&Place » installés : +3500 à travers le monde
Aujourd’hui, DEMAUREX est l’un des fabricants les plus réputés de systèmes Pick and Place avec plus de 3500 robots installés. Son expertise couvre des cellules robotisées, avec de la préhension de produits aussi bien emballés que nus. mais aussi des systèmes d’encartonnage intégrés.
Focus sur l'offre technique DEMAUREX
1. Manipulation haute cadence de produits nus
L’outil et la technologie sont les clefs de la réussite dans le domaine de la préhension de viennoiserie ou de pains en conditionnement primaire.
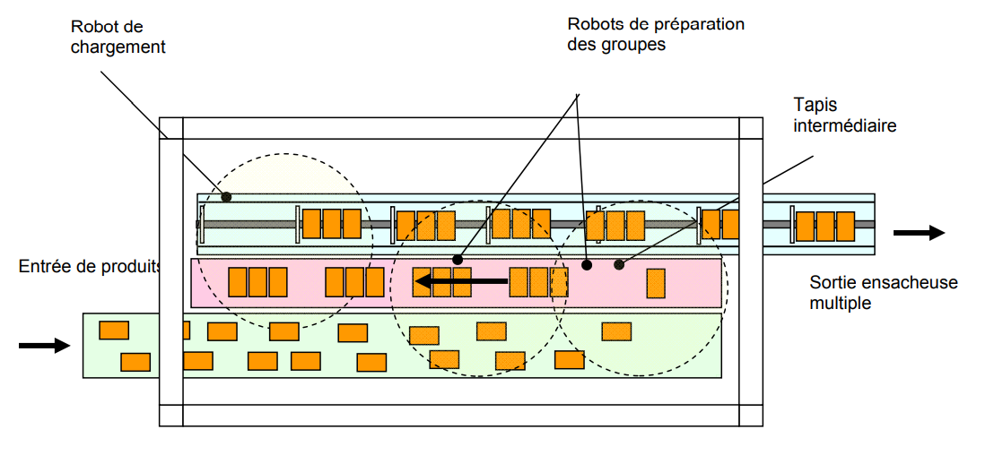
DEMAUREX regroupe très fréquemment les produits avant de les placer dans leur conditionnement final en une seule opération. Pour ce faire, la méthode du contre-flux est la plus efficace et garantit des regroupements complets.
2. Les préhenseurs à pinces
Les préhenseurs à pinces permettent de manipuler les produits sans les marquer ni les abîmer, contrairement aux préhenseurs à aiguilles. Ils assurent ainsi un transport délicat et hygiénique des pains, viennoiseries ou pâtisseries sur les lignes de production.

Intérêts des préhenseurs à pinces :
- Plus de marque sur les produits
- En ligne direct avec les ensacheuses individuelles
- Maintien de l’orientation des produits
- Dépose en tracking haute cadence
- Equilibrage des flux directement réalisés par les cellules robots
3. Lignes complètes de conditionnement en Clamshell
DEMAUREX propose également des lignes de conditionnement complètes de pâtisseries en utilisant des produits de type Clamshell ou blisters thermoformés.
Intérêts des lignes de conditionnement Clamshell :
- Dépileur et dépose de couvercles en dynamique
- Convient pour tous type de formats
- Pilotage réalisé à 100% par vision
Focus sur le Cobot Delta Wyzo - DEMAUREX
Le Wyzo est un robot collaboratif de type « cobot/sidebot » conçu par DEMAUREX, pionnier des robots Delta, et il a été primé pour son design innovant. Compact et agile, il peut travailler côte à côte avec des opérateurs humains sans barrières de sécurité, grâce à des capteurs avancés qui surveillent en continu l’environnement.
Avec une vitesse élevée (jusqu’à 90 cycles par minute) et une conception pensée pour s’intégrer facilement sur les lignes de production, il combine performance industrielle et collaboration sécurisée.
Intérêts du Cobot Wyzo :
- Rapide jusqu’à 90 coups/min
- Capable d’évoluer en sécurité dans une zone de travail
- Déplaçable dans l’usine (saisonnalité)
- Caméras intégrées pour la gestion jusqu’à 3 flux dynamiques.
Le cobot Wyzo est principalement utilisé pour des applications de Pick & Place, de tri et de manipulation de produits. Dans le secteur de la BVP, Il convient aussi bien aux opérations d’assemblage léger, de contrôle qualité ou d’emballage. Sa compatibilité avec des systèmes de vision et différents préhenseurs lui permet de s’adapter facilement à des tâches variées et évolutives.
Par rapport aux autres cobots, le Wyzo se distingue par sa vitesse élevée, nettement supérieure à celle des robots collaboratifs classiques, tout en restant sûr pour le travail en proximité avec l’humain. Sa conception compacte et sans barrières de sécurité réduit l’encombrement au sol et simplifie son intégration sur des lignes existantes. Enfin, sa flexibilité, sa facilité de programmation et sa capacité à passer rapidement d’un mode collaboratif à un mode haute performance en font une solution particulièrement efficace pour les environnements industriels dynamiques.
Conclusion
La robotisation en BVP offre aujourd’hui de nombreuses opportunités pour améliorer la performance des lignes, réduire la pénibilité et sécuriser les conditions de travail. Pour autant, chaque projet présente ses propres contraintes en termes de produits, de formats, de cadences, d’espace et d’exploitation, rendant indispensable une analyse technique approfondie en amont.
Les choix technologiques doivent être guidés par le besoin réel, l’environnement existant et les évolutions futures envisagées. Robot industriel, cobot, type de préhenseur ou niveau d’automatisation : chaque décision a un impact direct sur la performance, la fiabilité et la pérennité de l’installation. Bien pensée, la robotisation devient un véritable levier industriel ; mal dimensionnée, elle peut rapidement se transformer en contrainte.
C’est dans cette logique que s’inscrivent les solutions proposées par DEMAUREX, acteur reconnu pour son expertise en robotisation et automatisation des lignes BVP. Leur approche pragmatique et orientée usage permet d’apporter des réponses adaptées, qu’il s’agisse d’intégrer un robot dans une ligne existante ou de concevoir une solution complète et évolutive.
Hopi consulting vous accompagne dans cette démarche en vous proposant un accompagnement technique sur mesure, indépendant et en formule 100% BVP. Découvrez nos solutions d’appuis technique sur notre site internet.
Cet article a été écrit par Hopi consulting, l’ingénierie dédiée à la Boulangerie, Viennoiserie,
Pâtisserie. Découvrez d’avantage d’articles sur le blog Hopi consulting dédié la BVP.